|
TAO_RTCORBA
2.0.8
|
|
TAO_RTCORBA
2.0.8
|
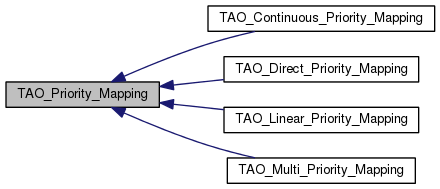
The interface for priority mapping. More...
#include <Priority_Mapping.h>
Public Member Functions | |
| virtual | ~TAO_Priority_Mapping (void) |
| The destructor. | |
| virtual CORBA::Boolean | to_native (RTCORBA::Priority corba_priority, RTCORBA::NativePriority &native_priority)=0 |
| virtual CORBA::Boolean | to_CORBA (RTCORBA::NativePriority native_priority, RTCORBA::Priority &corba_priority)=0 |
The interface for priority mapping.
Check the RT-CORBA spec (orbos/99-02-12) secions 4.5.2
| TAO_Priority_Mapping::~TAO_Priority_Mapping | ( | void | ) | [virtual] |
The destructor.
| virtual CORBA::Boolean TAO_Priority_Mapping::to_CORBA | ( | RTCORBA::NativePriority | native_priority, |
| RTCORBA::Priority & | corba_priority | ||
| ) | [pure virtual] |
| virtual CORBA::Boolean TAO_Priority_Mapping::to_native | ( | RTCORBA::Priority | corba_priority, |
| RTCORBA::NativePriority & | native_priority | ||
| ) | [pure virtual] |
 1.7.5.1
1.7.5.1

